
Emotional Learning and Control
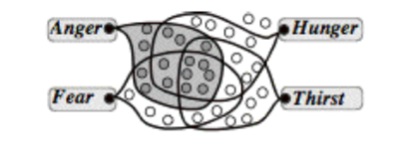
Recently, emotions have been widely used in systems that may face uncertainty or unknown situations. Various theories have been put forward for explaining emotions and their roles in mind. The model of emotional masks is a newly developed AI paradigm based on Minsky’s model of emotional mind in his recent book ―The emotion machine‖. This model takes a resource management approach toward modeling the mind and views different processes of mind as resources that need to be managed.
Research and projects
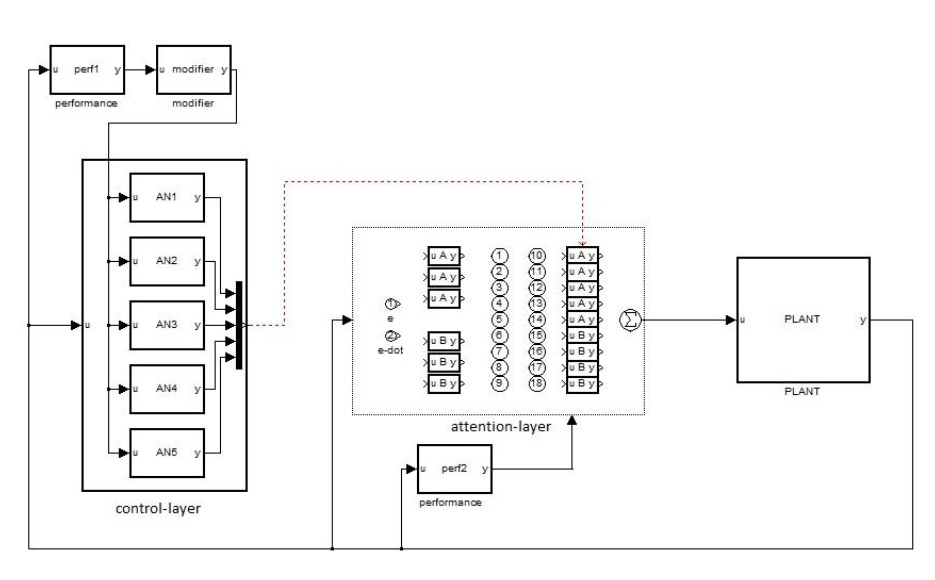
This work leads to the development of an intelligent controller (SCELIC) that is based on ideas from emotional masks, Self-Organizing Controllers and network-based fuzzy systems. On the way to the development of SCELIC, two more controllers are also introduced; the masker controller and the SOANFIC. The masker masks a present rule-base so that it can reduce the computations needed for the system, and SOANFIC is a further development of the Self-Organizing controllers that eliminates the need for knowledge of an incremental model and time lags in the process under control. SCELIC is a model free controller which benefits from several learning tasks. Multiple learning and the inherent adaptive structure make it a powerful adaptive and self-learning tool that performs the tasks of system identification and control in parallel. Emotions are produced in a system through a learning process, which learns to control the attention of the controller based on a performance measure. SCELIC is especially useful when we need a satisfactory response from a system in a short time and with the least computation costs.
M.Sc. Thesis Project, Hamidreza Saghir.
Supervisor: Prof. Saeed Bagheri Shouraki
Publications:
• H. R. Saghir and S. B. Shouraki, "Self-Organizing Adaptive Network-Based Fuzzy Intelligent Controller (SOANFIC)," International Journal of Machine Learning and Computing vol. 2, no. 6, pp. 864-868, 2012. [pdf]
• Saghir, H. R., Shouraki, S. B., Self Constructing Emotional Learning based Intelligent Controller (SCELIC). Proceedings of the International Multi Conferences of Engineers and Computer Scientists 2011 (IMECS 2011), Vol I, pp 148-153. [pdf]
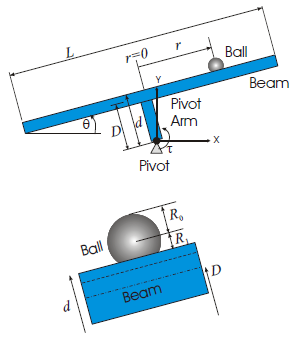
• Saghir, H. R., Shouraki, S. B., Emotional Control of a comprehensive nonlinear ball and beam system using SCELIC. Proceedings of the 2011 IEEE International Conference on Computer Control and Automation (ICCCA 2011), pp 244-248. [pdf]
• Saghir, H. R., Shouraki, S. B., Intelligent Control of a comprehensive nonlinear ball and beam system using SOANFIC. Proceedings of the 2011 IEEE International Conference on Computer Control and Automation (ICCCA 2011), pp 249-253. [pdf]
• Saghir, H. R., Shouraki, S. B., Fuzzy Control of an Inverted Pendulum based on Emotional Masking and Attention Control, Proceedings of the 2011 IEEE International Conference on Computer Control and Automation (ICCCA 2011), pp 254-258. [pdf]
M.Sc. Thesis Project, Hamidreza Saghir.
Supervisor: Prof. Saeed Bagheri Shouraki
Publications:
• H. R. Saghir and S. B. Shouraki, "Self-Organizing Adaptive Network-Based Fuzzy Intelligent Controller (SOANFIC)," International Journal of Machine Learning and Computing vol. 2, no. 6, pp. 864-868, 2012. [pdf]
• Saghir, H. R., Shouraki, S. B., Self Constructing Emotional Learning based Intelligent Controller (SCELIC). Proceedings of the International Multi Conferences of Engineers and Computer Scientists 2011 (IMECS 2011), Vol I, pp 148-153. [pdf]
• Saghir, H. R., Shouraki, S. B., Emotional Control of a comprehensive nonlinear ball and beam system using SCELIC. Proceedings of the 2011 IEEE International Conference on Computer Control and Automation (ICCCA 2011), pp 244-248. [pdf]
• Saghir, H. R., Shouraki, S. B., Intelligent Control of a comprehensive nonlinear ball and beam system using SOANFIC. Proceedings of the 2011 IEEE International Conference on Computer Control and Automation (ICCCA 2011), pp 249-253. [pdf]
• Saghir, H. R., Shouraki, S. B., Fuzzy Control of an Inverted Pendulum based on Emotional Masking and Attention Control, Proceedings of the 2011 IEEE International Conference on Computer Control and Automation (ICCCA 2011), pp 254-258. [pdf]
MEMS
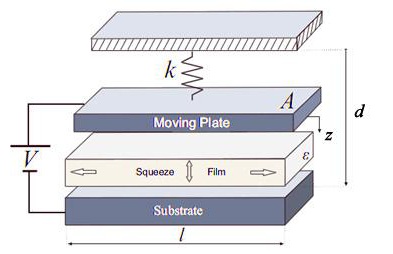
This work introduces a novel approach for measuring low pressures based on MEMS technology. In this technique the mechanism of squeeze film damping is used. A voltage is applied to a fixed-fixed MEMS beam and its step response is obtained; for each pressure there is a different response. Then the settling time is measured and we can relate each settling time with a defined pressure. Here, first we use some equations to relate pressure with the squeeze film damping effect; after that we use a micro beam model and relate its parameters with pressure. Then we use numerical analysis and simulation to show the procedure of pressure measuring. All simulation results are shown and discussed.
People involved: Ghafari A., Ghanbari A., Kamanzadeh S., Abbasian K., Saghir, H. R.
Supervisor: Dr. Ghanbari
Publications:
• Ghafari A., Ghanbari A., Kamanzadeh S., Abbasian K., Saghir, H. R., Developing a New Pressure Measurement Mechanism Based on Squeeze Film Damping Effect, The 2nd International Conference on Control Instrumentation and Automation (ICCIA2011). [pdf]
Parallel Robotics
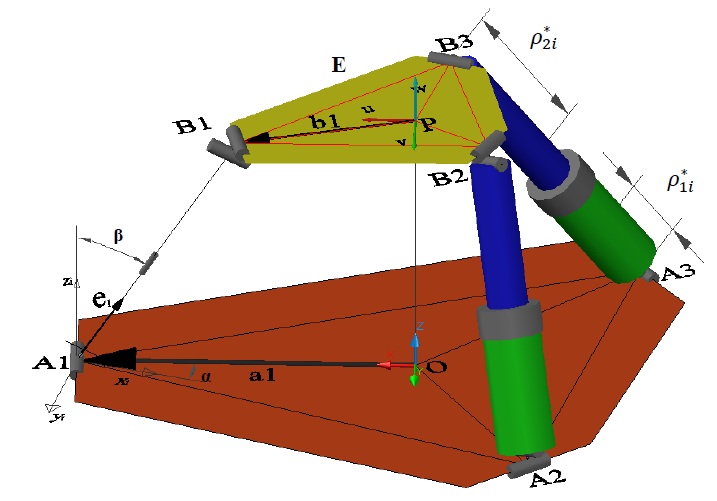
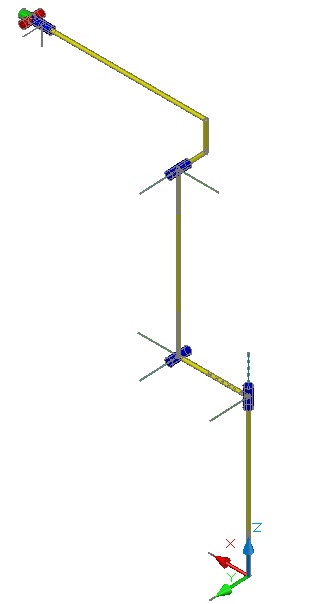
We performed the inverse dynamic and kinematic analysis of 3-RPS and 3-UPU parallel manipulators as well as writing the required MATLAB codes to simulate and control these systems. The manipulators had 3 DOF and consisted of two triangular platforms connected to each other using three legs with prismatic joints. All MATLAB codes for the kinematics and dynamics analyses were developed by me and were tested on two different maneuvers(x direction and z direction translation). The forces of actuated joints were calculated using the Natural Orthogonal Component (NOC) method, and they were found by considering both leg inertias and neglecting them. The time history of the length, velocity, acceleration, condition number and the forces were reported.
Serial Robotics
The second project was simulation and kinematic performance analysis of a PUMA robot. In this project the optimization of the condition number of Jacobian matrix was surveyed. After calculating transformation matrices, the two parts of Jacobian were derived using the components of End effector‘s transformation matrix. Optimizations were done by the MATLAB software in two methods: constrained and unconstrained function.
People involved: Hamidreza Saghir
Supervisor: Dr. Abbas Fattah
Dynamics and Control
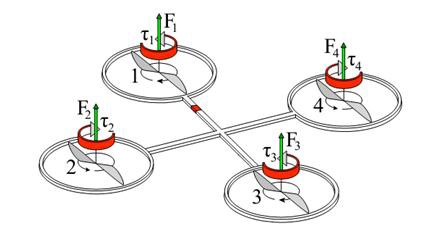
modeling and Control of several projects. In Modeling, Control and Simulation of a Quad-rotor UAV system, a symmetric quad-rotor platform was modeled and controlled using PID and LQR techniques. The code for this project was developed in MATLAB. This work was followed by two other projects on intelligent control techniques namely Dynamic Simulation and control of a cart pole system using Reinforcement Learning and Fuzzy Control, Analysis and simulation of an Inverted pendulum system. These projects were mainly performed and presented as course research projects.
People involved: Hamidreza Saghir
Supervisor: Dr. Amir Ali Khayyat
People involved: Hamidreza Saghir
Supervisor: Dr. Amir Ali Khayyat
People involved: Hamidreza Saghir
Supervisor: Dr. Abbas Fattah

About
Resume
Research