
 © All rights reserved - Iman Hemmatian
Last Update : March. 25, 2011
© All rights reserved - Iman Hemmatian
Last Update : March. 25, 2011

 Sharif University of Technology
Sharif University of Technology
 Home
Home
 Publications
Publications
 Invention
Invention
 Awards & memberships
Awards & memberships
 Research interest
Research interest
 Accomplishement
Accomplishement
 Work exp. & cv
Work exp. & cv
 Gallery
Gallery
 Contact
Contact
 Home
Home
 Publications
Publications
 Invention
Invention
 Awards & memberships
Awards & memberships
 Research interest
Research interest
 Accomplishments
Accomplishments
 Work exp. & cv
Work exp. & cv
 Gallery
Gallery
 Contact
Sharif University of Technology
Nonlinear Power Transmission Joint with Adjustment Capability (Patent No. 64414; Iranian Patent Office, Iran)
Contact
Sharif University of Technology
Nonlinear Power Transmission Joint with Adjustment Capability (Patent No. 64414; Iranian Patent Office, Iran)
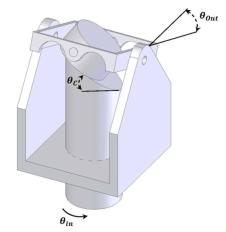 By the necessity of more accurate and efficient robotic systems in technology, the drive
By the necessity of more accurate and efficient robotic systems in technology, the drive systems for robot manipulators became important. The problems associated with
traditional transmission methods like gearboxes, such as friction, backlash and
compliance, and the development of electric motors for robotic applications, led to a new
design approach called direct-drive (DD) transmission. In this method the shaft of the
motor is directly coupled to the joint of the manipulator. The problem associated to this
kind of transmission is that the weight of the motors attached to robot joints reduces the
payload. So existence of an intermediate element that provides relocation becomes
important, leading to a design, named direct transmission (DT). This transmission method
has higher performance than DD, however, because dynamic complexities – like coupling
and non-linearity – are directly reflected on the motor shaft, one cannot use common
single-input single-output (SISO) control techniques to control the robot. This problem
can be resolved using more advanced control methods like model-based or computed
torque control. Another way is to redesign the manipulator to reduce dynamic complexity.
We proposed non-linear drive transmission which has the advantages of DT and
reduction ratio properties of gearboxes. It has very little friction, backlash, and
compliance compared to the traditional methods, while providing actuator relocation,
directness of DD, and a varying reduction ratio. The Nonlinear Power Transmission Joint
with Adjustment Capability, shown in Fig. It has all the advantages mentioned for DT
mechanisms.
Isometric View
systems for robot manipulators became important. The problems associated with
traditional transmission methods like gearboxes, such as friction, backlash and
compliance, and the development of electric motors for robotic applications, led to a new
design approach called direct-drive (DD) transmission. In this method the shaft of the
motor is directly coupled to the joint of the manipulator. The problem associated to this
kind of transmission is that the weight of the motors attached to robot joints reduces the
payload. So existence of an intermediate element that provides relocation becomes
important, leading to a design, named direct transmission (DT). This transmission method
has higher performance than DD, however, because dynamic complexities – like coupling
and non-linearity – are directly reflected on the motor shaft, one cannot use common
single-input single-output (SISO) control techniques to control the robot. This problem
can be resolved using more advanced control methods like model-based or computed
torque control. Another way is to redesign the manipulator to reduce dynamic complexity.
We proposed non-linear drive transmission which has the advantages of DT and
reduction ratio properties of gearboxes. It has very little friction, backlash, and
compliance compared to the traditional methods, while providing actuator relocation,
directness of DD, and a varying reduction ratio. The Nonlinear Power Transmission Joint
with Adjustment Capability, shown in Fig. It has all the advantages mentioned for DT
mechanisms.
Isometric View
 © All rights reserved - Iman Hemmatian
Last Update : March. 25, 2011
© All rights reserved - Iman Hemmatian
Last Update : March. 25, 2011